2025 线上展厅
年份:
- 2025
- 2024
- 2023
地区分类:
- 全部
- 中国大陆
- 中国台湾
- 中国香港
- 德国
- 日本
- 美国
- 韩国
- 意大利
- 瑞士
- 瑞典
应用行业:
展馆划分:

2-H09
帕西尼感知科技(深圳)有限公司
主营产品: 触觉传感器/触觉灵巧手/人形机器人
应用行业: 工业,医疗,商业服务,3C电子,物流仓储,车机产线

专业级机器人 ITPU触觉传感单元 PX-6AX GEN2
融合前沿的ITPU多维触觉技术,采用第二代芯片设计与新封装技术,1000Hz采样频率的超高分辨力下实现15种多维触觉感知

业内首款多维触觉+AI视觉双模态灵巧手 DexH13 GEN2
多维触觉灵巧手DexH13,是一款集多自由度机器人手、具备前沿的专业级机器人ITPU触觉传感单元及AI视觉技术与科技美学于一体的产品。基于领先的零样本位姿估计视觉算法,集成800万高清AI手眼相机,DexH13拥有卓越的视觉能力;借助单手近千个ITPU多维触觉传感单元和人工智能算法,DexH13具备如人类般细腻灵敏的触觉感知能力,灵活的指尖以及多关节、多自由度设计,高度还原人手动作模态,赋予其出色的运动能力,灵巧生动,完美模莫拟人手的抓取、旋转、拿捏等各项复杂动作,为先进制造、精密装配、医疗康养、教育科研等多个领域带来了前所未有的便利与效率提升。

多维触觉人形机器人TORA-ONE
第二代多维触觉人形机器人TORA-ONE拥有更多自由度的灵活双臂和4指仿生灵巧手。TORA-ONE拥有超高的47个自由度,其中本体有21个自由度,双灵巧手有26个主动自由度。TORA-ONE 拥有全身 47 个自由度,具备高度灵活性,特别是其 4 指仿生灵巧手的设计,不仅具备高自由度,还能精准模拟人类的复杂手部动作。这种设计使 TORA-ONE 在各类精细化操作中表现出色,能够应对从精密装配到复杂抓取等多种任务场景,进一步拓展了机器人的应用范围。
2-F68
蓝点触控(北京)科技有限公司
主营产品: 传感器系列:
人形机器人六维力传感器LA系列
通用六维力传感器LB系列
关节扭矩传感器LC、 LD系列
拉压力传感器LE系列
柔性力控打磨抛光一体工作站
打磨、抛光、去毛刺工作站(双工位、四工位、六工位、八工位)
力控软件包
应用行业: 工业机器人及相关配件制造/代理商/工业互联网,自动化设备及非标设备

.png)

2-R36
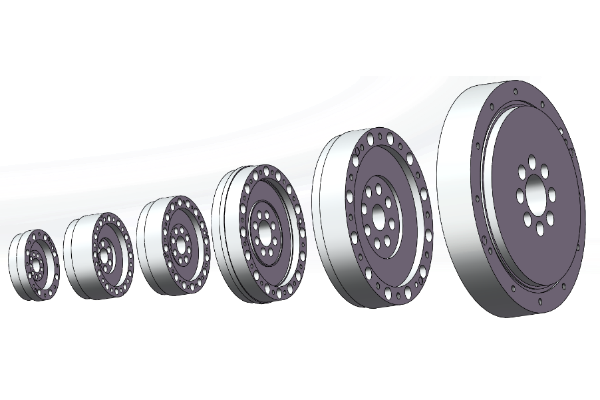
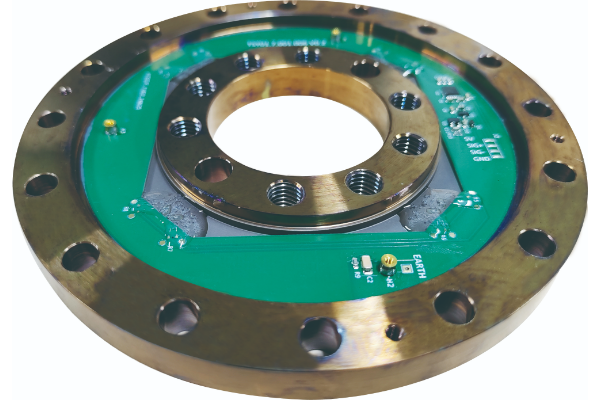
深圳市科盟创新机器人科技有限公司
主营产品: 高精度谐波减速器、智能机器人关节模组、工业机器人精密零部件、定制化控制系统等。
应用行业: 医疗器械制造、生物科技,工业机器人及相关配件制造/代理商/工业互联网,其他

.png)
2-K63
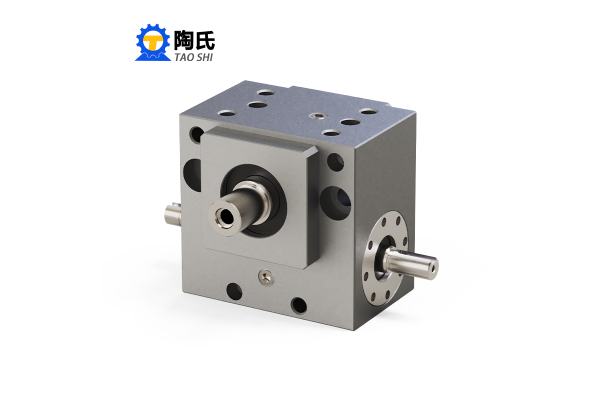
陶世智能科技(深圳)有限公司
主营产品: 多齿啮合蜗轮蜗杆减速机、多级大速比减速机、高精密超静音减速机、机加工件
应用行业: 工业机器人及相关配件制造/代理商/工业互联网,自动化设备及非标设备,工业机床/工业测量/3D打印设备制造商或代理商
2-H10
上海苇熠科技有限公司
主营产品: 苇熠科技多年来一直专注于智能机器人核心部件的研发、生产、销售及服务,产品包括无框电机、一体化关节模组以及应用解决方案。
应用行业: 工业机器人及相关配件制造/代理商/工业互联网

2-P36
北京天工俊联传感器有限公司
主营产品: 力传感器,角度传感器
应用行业: 工业机器人及相关配件制造/代理商/工业互联网
2-C26
深圳市泰科智能机器人有限公司
主营产品: 人形机器人关节模组,人形机器人四肢,双臂协作机器人,6轴协作机器人,7轴柔性机器人,伺服驱动器,增量/绝对值编码器
应用行业: 自动化设备及非标设备,工业机器人及相关配件制造商/代理商,机加工、精密零件制造,机床本体/工业测量等先进设备制造商/代理商

TB6系列协作机器人
TB6系列产品是泰科智能自主研发的六个自由度协作机器人,提供5种不同的有效负载3KG、5KG、10KG、15KG、20KG,拥有独特的机械结构设计和极具特色外观,先进的拖动示教、碰撞检测等功能的协作机器人。可以方便灵活的编程调试,操作简单,快速安装部署,广泛应用于工厂自动化、汽车、3C、医疗、电力、航天、科研、教育等行业领域。

轻量化人形机器人手臂 末端执行器 工业互联网/物联网 工业机器人其他
• 轻量型人形机器人手臂 • 定位精度高,可靠性稳定性大幅提升 • 精巧结构设计,更轻、更小、更紧凑

DR系列双臂协作机器人
• 双臂协同控制,人与机器人安全高效地并肩工作,没有障碍 • 模块化设计,快速拆装,维修更换快捷方便 • 手臂重量轻、尺寸小,紧凑型封装 • 卓越的运动控制碰撞检测,保障人员安全 • 精确的重复定位精度和路径精度 • 提供产品和解决方案定制化服务
2-W48
山东港智创信电子科技有限公司
主营产品: 六维力传感器、三维力传感器、单维力传感器、关节扭矩传感器、MEMS关节扭矩传感器、称重传感器等
应用行业: 工业机器人及相关配件制造/代理商/工业互联网



2-N69
广东润宇传感器股份有限公司
主营产品: 扭矩传感器:基于MEMS硅应变计的扭矩传感器,应用玻璃微熔技术将硅应变计贴合在高强度不锈钢弹性体上,具有灵敏度高、精度高、抗过载能力强、体积小、蠕变小、功耗低、工作寿命长等优点,适合人形机器人、协作机器人、医疗设备、外骨骼等应用场景。
压力传感器:掌握SOI硅应变压力测量和SOI扩散硅背部受压压力测量两大技术路线,实现核心技术自主和核心部件自产。产品广泛用于智能煤矿采集系统、高压共轨系统、缸内直喷发动机、燃气汽车、汽车空调、工程机械、物料成型设备、液压及气动控制系统等领域。
位移/液位传感器:掌握磁致伸缩位移测量和双电容液位测量两大技术路线,实现从敏感元件到产品全技术链闭环。
应用行业: 工业机器人及相关配件制造/代理商/工业互联网

位移/液位传感器
位移/液位传感器:掌握磁致伸缩位移测量和双电容液位测量两大技术路线,实现从敏感元件到产品全技术链闭环。产品广泛用于煤矿机械、工程机械、液压伺服油缸、物料成型设备、灌装设备、油田油库、酸碱液清洗设备、移动基站、水文监测等领域。
力传感器
扭矩传感器:基于MEMS硅应变计的扭矩传感器,应用玻璃微熔技术将硅应变计贴合在高强度不锈钢弹性体上,具有灵敏度高、精度高、抗过载能力强、体积小、蠕变小、功耗低、工作寿命长等优点,适合人形机器人、协作机器人、医疗设备、外骨骼等应用场景。

压力传感器
压力传感器:掌握SOI硅应变压力测量和SOI扩散硅背部受压压力测量两大技术路线,实现核心技术自主和核心部件自产。产品广泛用于智能煤矿采集系统、高压共轨系统、缸内直喷发动机、燃气汽车、汽车空调、工程机械、物料成型设备、液压及气动控制系统等领域。
