2025 线上展厅
年份:
- 2025
- 2024
- 2023
地区分类:
- 全部
- 中国大陆
- 中国台湾
- 中国香港
- 德国
- 日本
- 美国
- 韩国
- 意大利
- 瑞士
- 瑞典
应用行业:
展馆划分:

2-C01
中科新松有限公司
主营产品: 多可机器人系列产品通过CE和SEMI认证,凭借智能、安全、稳定等特点,广泛应用于汽车、能源,半导体,3C,食品药品,教育科研等多个行业。面对国内外不断增长的市场需求,多可机器人始终保持对技术发展路线、市场拓展趋势的敏锐洞察,坚持以高性能、高品质、高创新度的协作机器人产品,人性化、专业化的服务,帮助客户应对市场变化,助力客户在竞争中创造超预期的价值,也协同多个领域的标杆企业,创新行业级解决方案,始终站在机器人行业发展的前沿。目前多可机器人系列化产品已经出口东南亚、北美、欧洲等数十个国家与地区,品牌影响力享誉全球。
应用行业: 新能源技术,汽车、摩托车整车及零部件制造,电子及产品制造,医疗器械制造、生物科技,家电及厨卫,CNC/钣金/冲压/压铸等加工,自动化设备及非标设备,汽车电子,其他

多可GCR系列协作机器人
多可GCR系列协作机器人覆盖负载3-30kg、臂展618-2000mm等10款通用型6轴协作机器人产品,能够适应更广泛的应用需求,同时具有安全、易于操作、快速部署、低功耗等协作机器人特性。

多可焊接工作站
多可协作焊接机器人具有图形化交互和牵引示教两大核心功能,标配焊接工艺包,支持用户快速实现点焊、角焊、摆焊、往复焊、堆焊、多层多道焊等各种焊接作业任务,选配外部轴插件包后可支持用户扩展更多的焊接应用场景,定制各种形态的焊接工作站。 多可协作机器人优秀的重复定位精度和轨迹精度,适配激光视觉焊缝跟踪系统,可实现灵活部署、自动跟踪、自动纠偏等功能,实现长时间、不间断、高质量、高稳定性的焊缝输出,为汽车零部件、船舶制造、工程机械、新能源、航空航天、金属加工等领域的焊接自动化生产降本增效。

多可移动协作机器人
多可移动协作机器人集成自主研发的移动平台和协作机器人,可搭载自主研发的视觉和夹具等执行单元,实现对物料的搬运、装配、检测和精密加工等功能应用。多可移动协作机器人拥有全方位的安全防护、多种交互和通讯方式且能很好的对接客户系统。更可提供定制化解决方案、定制化调 度系统、现场指导及其完善的售后服务等,保证客户体验。 多可移动协作机器人作为标准化产品,具有非标设备所不具备的一致性、可靠性及其稳定性。
2-K07
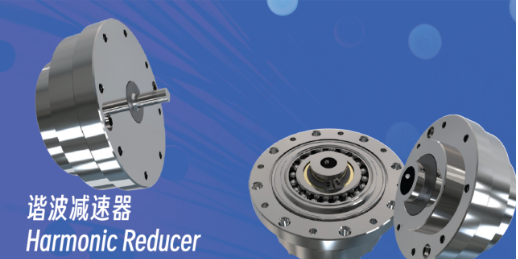
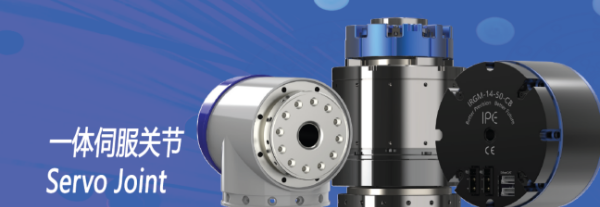
广州市科益精密机械设备有限公司
主营产品: 谐波减速器
一体式伺服关节
伺服驱动单元
应用行业: 工业机器人及相关配件制造/代理商/工业互联网,自动化设备及非标设备,医疗器械制造、生物科技,新能源技术
3-L22
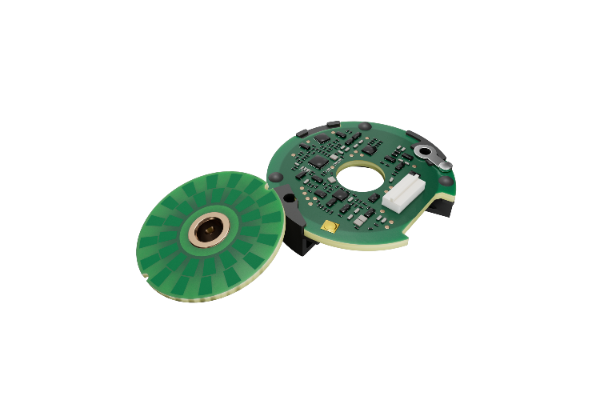
上海弓望电子科技有限公司
主营产品: 电感式编码器
应用行业: 自动化设备及非标设备,工业机床/工业测量/3D打印设备制造商或代理商,工业机器人及相关配件制造/代理商/工业互联网,汽车电子

2-D65
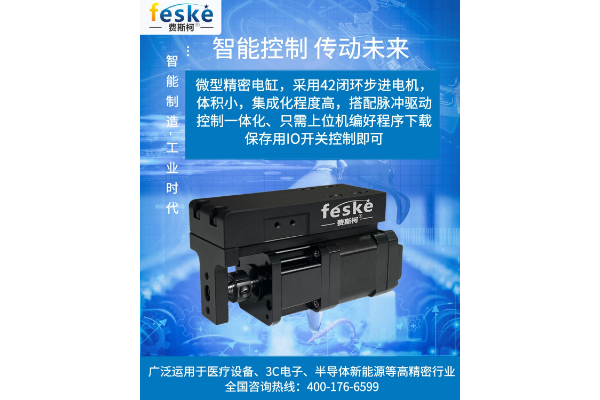
广东费斯柯自动化科技有限公司
主营产品: 精密型伺服电动缸、滚珠丝杆直线模组、皮带滑台模组、直线电机模组、驱控一体化电缸、四轴电缸联动平台、激光焊接机械手平台、三轴悬臂式上下料机械手、四轴龙门式坐标机械手,协作机器人等
应用行业: 新能源技术,汽车、摩托车整车及零部件制造,医疗器械制造、生物科技,家电及厨卫,CNC/钣金/冲压/压铸等加工,工业机器人及相关配件制造/代理商/工业互联网,机加工/精密零件制造,非标设备,模具及配件,新能源及汽车零部件,3C及电子制造,医疗器械,光通信及半导体,金属制品,通用设备


2-C26
深圳市泰科智能机器人有限公司
主营产品: 人形机器人关节模组,人形机器人四肢,双臂协作机器人,6轴协作机器人,7轴柔性机器人,伺服驱动器,增量/绝对值编码器
应用行业: 自动化设备及非标设备,工业机器人及相关配件制造商/代理商,机加工、精密零件制造,机床本体/工业测量等先进设备制造商/代理商

TB6系列协作机器人
TB6系列产品是泰科智能自主研发的六个自由度协作机器人,提供5种不同的有效负载3KG、5KG、10KG、15KG、20KG,拥有独特的机械结构设计和极具特色外观,先进的拖动示教、碰撞检测等功能的协作机器人。可以方便灵活的编程调试,操作简单,快速安装部署,广泛应用于工厂自动化、汽车、3C、医疗、电力、航天、科研、教育等行业领域。

轻量化人形机器人手臂 末端执行器 工业互联网/物联网 工业机器人其他
• 轻量型人形机器人手臂 • 定位精度高,可靠性稳定性大幅提升 • 精巧结构设计,更轻、更小、更紧凑

DR系列双臂协作机器人
• 双臂协同控制,人与机器人安全高效地并肩工作,没有障碍 • 模块化设计,快速拆装,维修更换快捷方便 • 手臂重量轻、尺寸小,紧凑型封装 • 卓越的运动控制碰撞检测,保障人员安全 • 精确的重复定位精度和路径精度 • 提供产品和解决方案定制化服务
3-S36
成都鑫德力科技有限公司
主营产品: 制动器
应用行业: 工业机器人及相关配件制造/代理商/工业互联网,自动化设备及非标设备

2-W48
山东港智创信电子科技有限公司
主营产品: 六维力传感器、三维力传感器、单维力传感器、关节扭矩传感器、MEMS关节扭矩传感器、称重传感器等
应用行业: 工业机器人及相关配件制造/代理商/工业互联网



2-N69
广东润宇传感器股份有限公司
主营产品: 扭矩传感器:基于MEMS硅应变计的扭矩传感器,应用玻璃微熔技术将硅应变计贴合在高强度不锈钢弹性体上,具有灵敏度高、精度高、抗过载能力强、体积小、蠕变小、功耗低、工作寿命长等优点,适合人形机器人、协作机器人、医疗设备、外骨骼等应用场景。
压力传感器:掌握SOI硅应变压力测量和SOI扩散硅背部受压压力测量两大技术路线,实现核心技术自主和核心部件自产。产品广泛用于智能煤矿采集系统、高压共轨系统、缸内直喷发动机、燃气汽车、汽车空调、工程机械、物料成型设备、液压及气动控制系统等领域。
位移/液位传感器:掌握磁致伸缩位移测量和双电容液位测量两大技术路线,实现从敏感元件到产品全技术链闭环。
应用行业: 工业机器人及相关配件制造/代理商/工业互联网

位移/液位传感器
位移/液位传感器:掌握磁致伸缩位移测量和双电容液位测量两大技术路线,实现从敏感元件到产品全技术链闭环。产品广泛用于煤矿机械、工程机械、液压伺服油缸、物料成型设备、灌装设备、油田油库、酸碱液清洗设备、移动基站、水文监测等领域。
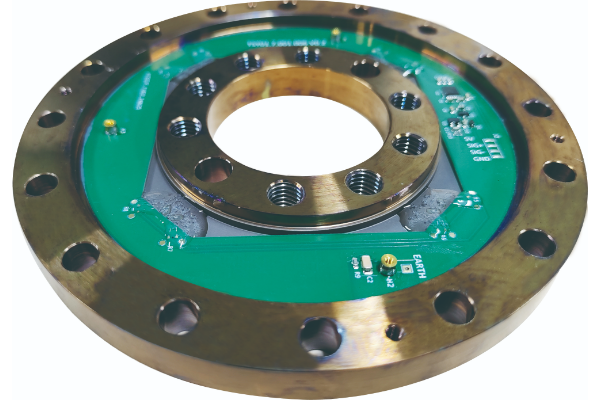
力传感器
扭矩传感器:基于MEMS硅应变计的扭矩传感器,应用玻璃微熔技术将硅应变计贴合在高强度不锈钢弹性体上,具有灵敏度高、精度高、抗过载能力强、体积小、蠕变小、功耗低、工作寿命长等优点,适合人形机器人、协作机器人、医疗设备、外骨骼等应用场景。

压力传感器
压力传感器:掌握SOI硅应变压力测量和SOI扩散硅背部受压压力测量两大技术路线,实现核心技术自主和核心部件自产。产品广泛用于智能煤矿采集系统、高压共轨系统、缸内直喷发动机、燃气汽车、汽车空调、工程机械、物料成型设备、液压及气动控制系统等领域。
