2025 线上展厅
年份:
- 2025
- 2024
- 2023
地区分类:
- 全部
- 中国大陆
- 中国台湾
- 中国香港
- 德国
- 日本
- 美国
- 韩国
- 意大利
- 瑞士
- 瑞典
应用行业:
展馆划分:

6-B70
东莞市稳锐五金模具有限公司
主营产品: 专业机加工 从大到小 从方到圆 强项:单散件与中小批量生产制造!!!
应用行业: 自动化设备及非标设备,模具及配件制造,机加工、精密零件制造,汽车、摩托车整车及零部件制造,机床本体/工业测量等先进设备制造商/代理商,航空航天、铁路及轨道交通,非标设备及自动化集成

1-Q49
深圳市嘉毅能源科技有限公司
主营产品: 通讯储能电源、工业用储能电源、家庭储能电源,电动两轮车、三轮车、电摩、四轮低速车电池、一体化路灯电池、风能,光伏储能电源
应用行业: 新能源技术

2-A48
东莞市禹瑞机电设备有限公司
主营产品: CRIUS·信瑞智能,成立于2008年,是一家集研发、生产、销售于一体的高新技术企业,主营PPU机械手、滑台模组、摆臂式机械人等工业自动化产品,服务于超2500家客户,产品广泛应用于:3C电子,五金,包装,视觉检测,锂电池等!
应用行业: 医疗器械,新能源及汽车零部件,3C及电子制造,金属制品,模具及配件,家电及厨卫



5-T52
深圳市世顺精密工业有限公司
主营产品: 电机座、马达座、丝杆固定座、丝杆支撑座、丝杆螺母座,传动直线模组、分割器、滚珠丝杆、微型导轨等;
应用行业: 新能源技术,汽车、摩托车整车及零部件制造,自动化设备及非标设备,医疗器械制造、生物科技,电子及产品制造,工业机床/工业测量/3D打印设备制造商或代理商,CNC/钣金/冲压/压铸等加工,金属及塑胶制品,工业机器人及相关配件制造/代理商/工业互联网,其他,机加工/精密零件制造,非标设备,模具及配件,新能源及汽车零部件,3C及电子制造,医疗器械,光通信及半导体,通用设备,金属制品

电机座
马达座固定座,电机座 材料:HT250/HT300 本体铸件采用德国工艺铸造,材质为HT250-HT300并做48小时退火处理,精加工后垂直度与同心度均可达到0.02MM以内。表面采用磷化处理防腐性和耐磨性强。其广泛应用于各种工业机床,半导体,通用设备,自动化设备等众多设备与自动化行业

丝杆固定座
材料:本体45#钢/轴承钢 固定座匀使用角接触轴承,经预压处理后轴向0间隙,产品由本体、压盖、油封、衬套合成一套。表面采用磷化处理防腐和耐磨性强。衬套采购轴承钢经渗碳处理,内外与平面研磨,硬度可达58-62度。,其广泛应用于各种工业机床,自动化设备等众多行业

丝杆支撑侧
材料:本体45#钢/轴承钢 支撑侧的支撑单元使用深沟球轴承,是连接丝杆和电机的轴承固定座,能直接安装,长期使用。表面采用磷化处理防腐和耐磨性强,其广泛应用于各种工业机床,半导体,通用设备,自动化设备等众多设备与自动化行业
2-L56
深圳市精稳自动化设备有限公司
主营产品: 真空发生器 阀岛 电磁阀 气动元件
应用行业: 自动化设备及非标设备,气动元件
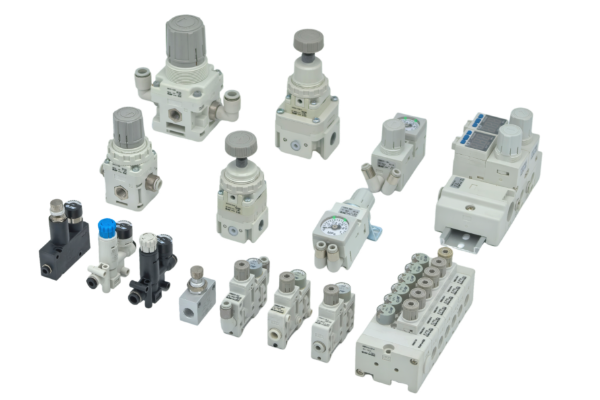
精密减压阀
精密减压阀的原理主要是通过控制启闭件的开度,调节介质流量来实现减压,并依靠阀后压力的反馈作用保持出口压力稳定 弹簧膜片结构作用:以常见的弹簧膜片式为例,介质从进口进入减压阀。当进口压力升高时,推动膜片向下变形,膜片连接的阀芯下移,使阀口开度减小,节流作用增强,介质通过阀口时的压力损失增大,从而降低出口压力。当进口压力降低时,膜片在弹簧力作用下向上移动,阀芯上移,阀口开度增大,节流作用减弱,出口压力相对稳定。 压力平衡调节:通过调节弹簧的预紧力,可以设定出口压力的目标值。弹簧对膜片施加一个向上的力,与进口压力通过膜片产生的向下的力相平衡。当出口压力偏离设定值时,膜片的变形会改变阀口开度,使出口压力回到设定范围内。 压力平衡调节:通过调节弹簧的预紧力,可以设定出口压力的目标值。弹簧对膜片施加一个向上的力,与进口压力通过膜片产生的向下的力相平衡。当出口压力偏离设定值时,膜片的变形会改变阀口开度,使出口压力回到设定范围内。
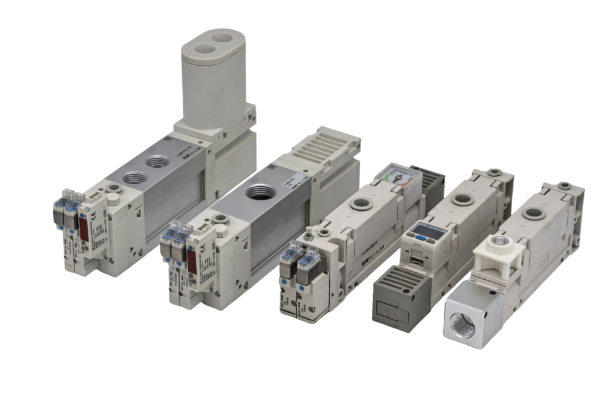
多级真空发生器
多级真空发生器是一种利用正压气源产生负压的新型真空元器件。以下是关于它的介绍: 工作原理 多级真空发生器基于文丘里效应和流体力学原理,主要通过以下方式工作: 多级喷嘴结构:设有多个级别的喷嘴。压缩空气进入后,首先通过一级喷嘴,以高速喷射出来,在喷射过程中,根据伯努利原理,空气流速增加会导致压力降低,从而在喷嘴出口附近形成局部低压区,产生一定的抽吸作用,卷吸周围的空气。随后,经过一级喷嘴产生的气流和被卷吸的空气一起进入下一级喷嘴,下一级喷嘴会进一步对气流进行加速和降压,再次增强抽吸效果,如此经过多级喷嘴的作用,不断放大抽吸能力,最终在出口处形成较大的真空抽气量和较高的真空度。 级联式压缩空气供应:采用级联的方式供应压缩空气,将多个文丘里阶段串联起来。在每个阶段,压缩空气的能量被逐步利用,前一级产生的负压和气流为下一级提供动力和基础,使得每一级都能在前一级的基础上进一步提高真空度和抽气量,通过这种级联效应,多级真空发生器能够更有效地利用压缩空气的能量,以较少的压缩空气消耗产生较大的真空抽气量。 中间阀门控制:在多级结构中,通常会设置中间阀门。这些阀门可以根据需要逐步隔离每个阶段,通过控制阀门的开闭状态,能够调节每个阶段的气流通道和压力分布,从而精确地控制真空度的形成和调整。在低真空水平下,可以通过合理控制中间阀门,使各级喷嘴协同工作,集中产生重要的吸气流量,满足不同工况下对真空度和抽气量的要求。 特点 节能高效:能以较少的压缩空气消耗产生较大的真空抽气量,相比单级真空发生器可节约大量压缩空气。 高真空度和大抽气量:可达到较高的真空度,同时提供较大的抽气流量,能够快速建立所需的真空环境。 结构紧凑:设计较为紧凑,体积小、重量轻,安装方便,可适应各种空间有限的工作环境。 清洁环保:无需使用润滑油等辅助材料,工作过程中不会产生污染,符合环保要求。 维护简便:无传动部件,减少了磨损和故障点,不需要额外的润滑和复杂保养,维护成本低。 应用场景 自动化生产线:在电子、汽车等行业的自动化生产线上,用于零部件的吸附、搬运、装配等操作。 包装行业:如食品、药品、日用品等的包装过程中,用于抽取包装袋内的空气,实现真空包装,确保产品的保存质量和密封性。 机器人领域:作为机器人末端执行器的一部分,为机器人提供真空吸附力,使其能够抓取和搬运各种形状和材质的工件。 印刷行业:在印刷设备中,用于纸张的输送、定位和吸附,保证印刷过程的准确性和稳定性。 医疗设备:在医疗设备制造、诊断和治疗过程中,用于真空吸附、真空消毒、医疗器械的组装等操作
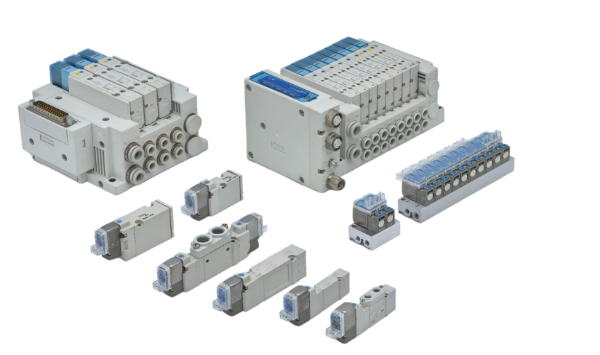
阀岛
阀岛通常由通讯模块、气动模块和各种接口组成。其原理主要体现在以下几个方面: 信号输入与传输原理 多针接口方式:通过一根带多针插头的多股电缆,将可编程控制器的输出控制信号、输入信号与阀岛相连,传感器输出的信号也通过电缆连接到阀岛的电信号输入口。所有电信号的处理、保护功能如极性保护、光电隔离、防水等都在阀岛上实现,系统不再需要接线盒。 现场总线方式:现场总线以电信号传输方式,按一定数据格式实现控制系统中信号的双向传输,两个对象之间只需一根两股或四股的电缆连接,以电位差方式传输。在带现场总线的阀岛系统中,每个阀岛都有总线输入口和总线输出口,多个阀岛或其他带现场总线设备可串联连接,能与各种型号的可编程控制器直接或通过总线转换器连接。 控制与处理原理 传感器检测:阀岛中的传感器负责检测介质的压力、温度、流量等参数,将这些物理量转换为电信号,为后续控制提供数据基础。 控制器运算:阀岛内置的控制器接收传感器传来的电信号,运用如 PID 控制、逻辑控制、模糊控制等算法进行处理和运算,根据预设的目标和实际检测值,确定需要对阀门执行的操作指令。 气动执行原理 气源供应:外部压缩空气进入阀岛的气动模块,为气动执行机构提供动力。 阀门控制:控制器发出的指令传达到气动执行机构,通常是通过控制电磁阀的开闭状态,来切换气动回路,进而控制气动执行机构,如气缸的伸缩、旋转等动作,最终实现对流体介质的流量、压力、通断等控制。 通信与交互原理 与上位机通信:阀岛可通过通信模块与上位机或监控系统进行信息交互,采用如工业以太网、Profibus、DeviceNet 等通信协议,将自身的工作状态、参数信息等上传给上位机,同时接收上位机下达的控制指令和参数设置等信息。 设备间联动:在复杂的工业自动化系统中,阀岛能与其他具有通信功能的设备,如传感器、执行器、其他控制单元等进行通信和联动,通过相互之间的信息传递和协同工作,实现整个生产过程的自动化、智能化控制。
1-C24
惠州亿纬锂能股份有限公司
主营产品: 提供从电芯到电池包一站式锂电池解决方案,包括医疗电池及电池包,消费类电池,储能电池及系统及动力电池等。
应用行业: 医疗器械制造、生物科技,汽车电子,新能源技术

CR17505
• 标称容量:3.0Ah • 标称电压:3.0V • 最大持续放电电流:2000mA • 最大脉冲电流:4000mA • 标准放电电流:2mA • 工作温度范围:-40℃C~+85°C • 重量:26.5g
CR123A
• 标称容量:1.5Ah • 标称电压:3.0V • 标准放电电流:20mA • 最大脉冲放电电流:2000mA • 最大持续放电电流:1000mA • 工作温度范围:-40℃ ~ +70℃ • 重量:17.0g

CR2032
• 标称容量:225mAh • 标称电压:3.0V • 标准放电电流:0.2mA • 最大脉冲放电电流:15mA • 最大持续放电电流:3mA • 工作温度范围:-20℃ ~ +70℃ • 重量:3.2g
3-N43
河北富兰特轴承有限公司
主营产品: 聚氨酯包胶轴承,包塑轴承,外螺纹轴承,滚轮包胶,塑料轴承,定制不锈钢,轴承钢,45#非标轴承及FA自动化零部件
应用行业: 新能源技术,医疗器械制造、生物科技,电子及产品制造,金属及塑胶制品,自动化设备及非标设备
6-L62
中山市乾润精密钢球制造有限公司/中山市红润泰精密钢球有限公司
主营产品: 轴承钢球,不锈钢球,黄铜球,纯铜球,陶瓷球,碳钢球,玻璃球,塑料球
应用行业: 汽车、摩托车整车及零部件制造

